
The demonstration, run on Dec 8 and Dec 10, 2025, used generative AI to create waypoints for the six wheeled rover, taking over a complex decision making task that mission teams have traditionally handled manually at NASA's Jet Propulsion Laboratory in Southern California.
"This demonstration shows how far our capabilities have advanced and broadens how we will explore other worlds," said NASA Administrator Jared Isaacman. "Autonomous technologies like this can help missions to operate more efficiently, respond to challenging terrain, and increase science return as distance from Earth grows. It is a strong example of teams applying new technology carefully and responsibly in real operations."
For the test, Perseverance relied on the same type of data that human planners use for route design. The AI system processed high resolution images and terrain information to generate a sequence of waypoints, each representing a position where the rover would adopt a new set of commands as it moved across the Martian surface.
The initiative originated in JPL's Rover Operations Center and was carried out in collaboration with Anthropic, which supplied its Claude AI models for the trial. The models were integrated into mission planning workflows to analyze surface data and propose paths that met strict safety requirements for the rover.
Mars sits on average about 140 million miles, or 225 million kilometers, from Earth, which means there is a significant communication delay that rules out real time joystick style driving. For nearly three decades, rover routes have been created by human drivers who study imagery and engineering data, sketch a safe path using waypoints usually no more than 100 meters apart, and then uplink that plan via NASA's Deep Space Network.
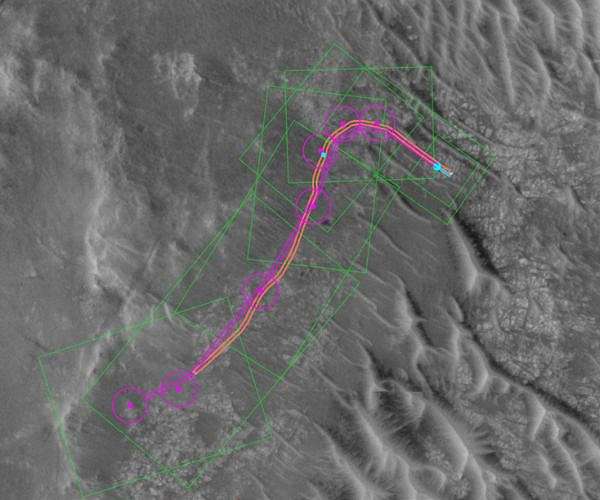
For the sols 1,707 and 1,709 drives, the team changed that pattern. Generative AI examined high resolution orbital imagery from the HiRISE (High Resolution Imaging Science Experiment) camera on NASA's Mars Reconnaissance Orbiter together with terrain slope data from digital elevation models. It identified key terrain features such as bedrock, outcrops, boulder fields, and sand ripples, then produced a continuous path that included all the intermediate waypoints Perseverance would need.
Engineers then checked the AI generated commands using JPL's digital twin, a detailed virtual replica of the rover and its systems. They validated more than half a million telemetry variables in simulation to confirm that the instructions would be compatible with flight software and safe to execute on Mars before transmitting the drive sequences.
On Dec 8, equipped with the AI defined waypoints, Perseverance drove 689 feet, or 210 meters, across the crater rim. Two days later the rover covered 807 feet, or 246 meters, in a second AI planned drive, demonstrating the ability of the system to support extended traverses over challenging terrain.
"The fundamental elements of generative AI are showing a lot of promise in streamlining the pillars of autonomous navigation for off planet driving: perception, localization, and planning and control," said Vandi Verma, a space roboticist at JPL and a member of the Perseverance engineering team. She added that the team is moving toward a future where generative AI and other smart tools help surface rovers tackle kilometer scale drives, reduce operator workload, and scan large data sets of rover images to flag surface features of interest for scientists.
Matt Wallace, manager of JPL's Exploration Systems Office, said the same class of intelligent systems could extend beyond ground based planning tools. "Imagine intelligent systems not only on the ground at Earth, but also in edge applications in our rovers, helicopters, drones, and other surface elements trained with the collective wisdom of our NASA engineers, scientists, and astronauts," he said. He described this as game changing technology needed to build the infrastructure and systems that will support a permanent human presence on the Moon and carry the United States to Mars and beyond.
Perseverance operations are managed at JPL, which is run by Caltech for NASA and houses the Rover Operations Center. The mission is part of NASA's Mars Exploration Program and supports the agency's broader Science Mission Directorate goals for exploring the Red Planet and preparing for future human expeditions.
For more information on the Rover Operations Center and its work in surface mission support, mission planners direct readers to the program site at https://www.jpl.nasa.gov/roc/.
Related Links
Rover Operations Center at JPL/NASA
Mars News and Information at MarsDaily.com
Lunar Dreams and more
| Subscribe Free To Our Daily Newsletters |

| Subscribe Free To Our Daily Newsletters |