
A new review led by Professor Xiaodong Chen of Nanyang Technological University, in collaboration with Professor Jia Zhang and Professor Dianpeng Qi from Harbin Institute of Technology, surveys how flexible electronics are transforming robot hardware from the device level up. Published in the journal SmartBot, the work analyzes recent progress in flexible electronic technologies and maps how these advances support the development of more intelligent robotic platforms.
Flexible electronic devices are built on stretchable or bendable substrates using processes such as 3D printing, micro and nano fabrication, screen printing, and inkjet printing. In the review, the authors group these devices into three main categories: flexible sensors, flexible circuits, and flexible actuators. Each category offers specific advantages for robotic systems, from improved environmental and tactile sensing to compact signal processing and compliant motion output.
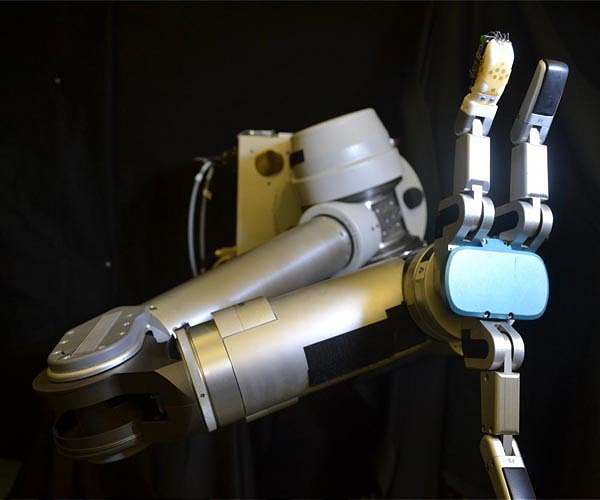
The authors highlight that flexible sensors can be laminated or embedded onto curved robot surfaces, allowing robots to actively sense contact, pressure, strain, and other stimuli across their bodies. This conformal coverage provides richer data about the environment and robot state than rigid sensors located only at a few points. The resulting high density sensing networks give robots a more continuous and detailed perception basis for later stages of autonomous behavior.
Flexible circuits, fabricated on pliable substrates, enable signal acquisition, conditioning, and computation to be brought physically closer to the sensing and actuation sites. By bending and stretching with the robot structure, these circuits support compact layouts and help reduce wiring complexity that typically constrains rigid systems. The review notes that such circuits make it easier to build integrated modules where sensing, processing, and communication are tightly coupled.
Flexible actuators form the third core device class discussed in the paper. These components convert electrical inputs into motion while matching the mechanical compliance of soft or articulated robot bodies. When combined with flexible sensors and circuits, they allow robots to execute finely controlled movements that respond directly to local feedback. This co design of sensing and actuation in a flexible framework underpins more precise and adaptive manipulation.
Beyond cataloging devices, the authors devote special attention to methods for conformal integration of flexible electronics onto robot structures. They identify this as a previously under explored but essential subfield, since the practical utility of flexible devices depends on reliable attachment, interconnection, and packaging on complex surfaces. Their analysis covers strategies to achieve seamless coverage with high device density while maintaining mechanical robustness and signal integrity.
Treating robots as intelligent autonomous entities, the review traces how flexible electronics support each stage of the intelligence pipeline. At the command reception level, flexible interfaces can capture human intent more naturally through wearable or skin like sensors that detect motion, touch, or other cues. This improves how robots receive instructions from human users or other systems.
During command understanding and decision making, dense and distributed sensing made possible by flexible devices gives control algorithms a more complete picture of context. The authors argue that this information richness forms a stronger basis for autonomous decisions than the sparse data available from conventional rigid setups. Flexible circuits then locally process or route these signals, enabling more efficient and scalable system architectures.
In the action execution phase, flexible actuators and integrated sensor arrays allow robots to perform tasks with higher accuracy and better adaptability. The review reports that the introduction of flexible sensors throughout the workflow significantly enhances performance at every step, from interaction through to manipulation. According to the authors, these improvements collectively represent a transformative leap in the development of intelligent robotic systems.
The paper concludes that flexible electronics are not just incremental upgrades to existing robot hardware, but a foundational technology for next generation intelligent robots. By enabling conformable, high density electronic integration across robot bodies, flexible devices change how robots sense, think, and act. This shift opens the door to new robot forms and capabilities that are difficult or impossible to achieve with rigid electronics alone.
Looking ahead, the team expects continued exploration of new application frontiers where flexible electronics and robotics intersect. They anticipate that deeper integration between these fields will accelerate the emergence of truly intelligent robotic platforms capable of more natural interaction, robust autonomy, and precise operation in complex environments. The authors express optimism that ongoing research will address remaining technical challenges and move flexible electronic robot systems closer to widespread deployment.
Research Report:Flexible Electronics in Robotics Systems: From Devices to Applications
Related Links
Harbin Institute of Technology
All about the robots on Earth and beyond!
| Subscribe Free To Our Daily Newsletters |
| Subscribe Free To Our Daily Newsletters |