| . |  |
. |
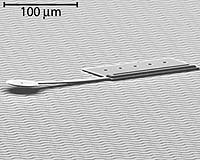
In a world where "supersize" has entered the lexicon, there are some things getting smaller, like cell phones and laptops. Dartmouth researchers have contributed to the miniaturizing trend by creating the world's smallest untethered, controllable robot. Their extremely tiny machine is about as wide as a strand of human hair, and half the length of the period at the end of this sentence. About 200 of these could march in a line across the top of a plain M&M. The researchers, led by Bruce Donald, the Joan P. and Edward J. Foley Jr. 1933 Professor of Computer Science at Dartmouth, report their creation in a paper that will be presented at the 12th International Symposium of Robotics Research in October in San Francisco, which is sponsored by the International Federation of Robotics Research. A longer, more detailed paper about this microrobot will also appear in a forthcoming issue of the Journal of Microelectromechanical Systems, a publication of the IEEE, the Institute of Electrical and Electronics Engineers. "It's tens of times smaller in length, and thousands of times smaller in mass than previous untethered microrobots that are controllable," says Donald. "When we say 'controllable,' it means it's like a car; you can steer it anywhere on a flat surface, and drive it wherever you want to go. It doesn't drive on wheels, but crawls like a silicon inchworm, making tens of thousands of 10-nanometer steps every second. It turns by putting a silicon 'foot' out and pivoting like a motorcyclist skidding around a tight turn." The future applications for micro-electromechanical systems, or MEMS, include ensuring information security, such as assisting with network authentication and authorization; inspecting and making repairs to an integrated circuit; exploring hazardous environments, perhaps after a hazardous chemical explosion; or involving biotechnology, say to manipulate cells or tissues. Donald worked with Christopher Levey, Assistant Professor of Engineering and the Director of the Microengineering Laboratory at Dartmouth's Thayer School of Engineering, Dartmouth Ph.D. students Craig McGray and Igor Paprotny, and Daniela Rus, Associate Professor of Electrical Engineering and Computer Science at the Massachusetts Institute of Technology.
McGray, who earned a Ph.D. in Computer Science working on this project in Donald's lab, adds, "Machines this small tend to stick to everything they touch, the way the sand sticks to your feet after a day at the beach. So we built these microrobots without any wheels or hinged joints, which must slide smoothly on their bearings. Instead, these robots move by bending their bodies like caterpillars. At very small scales, this machine is surprisingly fast." McGray is currently a researcher at the National Institute of Standards and Technology in Gaithersburg, Md. The prototype is steerable and untethered, meaning that it can move freely on a surface without the wires or rails that constrained the motion of previously developed microrobots. Donald explains that this is the smallest robot that transduces force, is untethered, and is engaged in its own locomotion. The robot contains two independent microactuators, one for forward motion and one for turning. It's not pre-programmed to move; it is teleoperated, powered by the grid of electrodes it walks on. The charge in the electrodes not only provides power, it also supplies the robot's instructions that allow it to move freely over the electrodes, unattached to them. The work was funded in part by the Department of Homeland Security, Office of Domestic Preparedness through Dartmouth's Institute for Security Technology Studies (ISTS). Related Links Dartmouth College SpaceDaily Search SpaceDaily Subscribe To SpaceDaily Express  Kent, UK (SPX) Sep 08, 2005
Kent, UK (SPX) Sep 08, 2005Scientists have developed a new ultra-light limb that can mimic the movement in a real hand better than any currently available.
|
| |||||||||||
| The content herein, unless otherwise known to be public domain, are Copyright 1995-2016 - Space Media Network. All websites are published in Australia and are solely subject to Australian law and governed by Fair Use principals for news reporting and research purposes. AFP, UPI and IANS news wire stories are copyright Agence France-Presse, United Press International and Indo-Asia News Service. ESA news reports are copyright European Space Agency. All NASA sourced material is public domain. Additional copyrights may apply in whole or part to other bona fide parties. Advertising does not imply endorsement, agreement or approval of any opinions, statements or information provided by Space Media Network on any Web page published or hosted by Space Media Network. Privacy Statement All images and articles appearing on Space Media Network have been edited or digitally altered in some way. Any requests to remove copyright material will be acted upon in a timely and appropriate manner. Any attempt to extort money from Space Media Network will be ignored and reported to Australian Law Enforcement Agencies as a potential case of financial fraud involving the use of a telephonic carriage device or postal service. |