| . |  |
. |
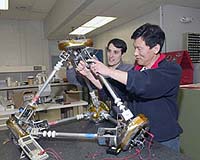
Like new and protective parents, engineers watched as the TETWalker robot successfully traveled across the floor at NASA's Goddard Space Flight Center in Greenbelt, Maryland. Robots of this type will eventually be miniaturized and joined together to form "autonomous nanotechnology swarms" (ANTS) that alter their shape to flow over rocky terrain or to create useful structures like communications antennae and solar sails. This technology has the potential to directly support NASA's Vision for Space Exploration. "This prototype is the first step toward developing a revolutionary type of robot spacecraft with major advantages over current designs," said Dr. Steven Curtis, Principal Investigator for the ANTS project, a collaboration between Goddard and NASA's Langley Research Center in Hampton, Va. Using advanced animation tools, Langley is developing rover operational scenarios for the ANTS project. The robot is called "TETwalker" for tetrahedral walker, because it resembles a tetrahedron (a pyramid with 3 sides and a base). In the prototype, electric motors are located at the corners of the pyramid called nodes. The nodes are connected to struts which form the sides of the pyramid. The struts telescope like the legs of a camera tripod, and the motors expand and retract the struts. This allows the pyramid to move: changing the length of its sides alters the pyramid's center of gravity, causing it to topple over. The nodes also pivot, giving the robot great flexibility. In January 2005, the prototype was shipped to McMurdo station in Antarctica to test it under harsh conditions more like those on Mars. The test indicated some modifications will increase its performance; for example, placing the motors in the middle of the struts rather than at the nodes will simplify the design of the nodes and increase their reliability. The team anticipates TETwalkers can be made much smaller by replacing their motors with Micro- and Nano-Electro-Mechanical Systems. Replacement of the struts with metal tape or carbon nanotubes will not only reduce the size of the robots, it will also greatly increase the number that can be packed into a rocket because tape and nanotube struts are fully retractable, allowing the pyramid to shrink to the point where all its nodes touch. These miniature TETwalkers, when joined together in "swarms," will have great advantages over current systems. The swarm has abundant flexibility so it can change its shape to accomplish highly diverse goals. For example, while traveling through a planet's atmosphere, the swarm might flatten itself to form an aerodynamic shield. Upon landing, it can shift its shape to form a snake-like swarm and slither away over difficult terrain. If it finds something interesting, it can grow an antenna and transmit data to Earth. Highly-collapsible material can also be strung between nodes for temperature control or to create a deployable solar sail. Additionally, the nodes will be designed to disconnect and reconnect to different struts. If a meteoroid or rough landing punches a hole in the swarm, the system can heal itself by rejoining undamaged nodes. "Spacecraft are so expensive because failure in a single component can cripple the entire spacecraft, so extensive testing and redundant systems are employed to reduce the chance of catastrophic failure. We wouldn't live long if our bodies worked like this. "Instead, when we get hurt, new cells replace the damaged ones. In a similar way, undamaged units in a swarm will join together, allowing it to tolerate extensive damage and still carry out its mission," said Curtis. The pyramid shape is also fundamentally strong and stable. "If current robotic rovers topple over on a distant planet, they are doomed - there is no way to send someone to get them back on their wheels again. However, TETwalkers move by toppling over. It's a very reliable way to get around," said Curtis. Extensive research in artificial intelligence is underway to get the robots to move, navigate, and work together in swarms autonomously. The research includes development of a novel interface that integrates high-level decision-making with lower-level functions typically handled intuitively by living organisms, like walking and swarming behavior. All systems are being designed to adapt and evolve in response to the environment. The research was initially funded by the Goddard Director's Discretionary Fund, which supports innovative projects with the potential for a high payoff even if the chance of success is low. Many past projects have blossomed into new instruments, flights, or research directions. McMurdo station is run by the National Science Foundation. Related Links SpaceDaily Search SpaceDaily Subscribe To SpaceDaily Express  Bermuda (SPX) Mar 29, 2005
Bermuda (SPX) Mar 29, 2005A small autonomous underwater vehicle, or AUV, named Spray was launched last Thursday (24 March) about 12 miles southeast of Bermuda.
|
| ||||||||||
| The content herein, unless otherwise known to be public domain, are Copyright 1995-2016 - Space Media Network. All websites are published in Australia and are solely subject to Australian law and governed by Fair Use principals for news reporting and research purposes. AFP, UPI and IANS news wire stories are copyright Agence France-Presse, United Press International and Indo-Asia News Service. ESA news reports are copyright European Space Agency. All NASA sourced material is public domain. Additional copyrights may apply in whole or part to other bona fide parties. Advertising does not imply endorsement, agreement or approval of any opinions, statements or information provided by Space Media Network on any Web page published or hosted by Space Media Network. Privacy Statement All images and articles appearing on Space Media Network have been edited or digitally altered in some way. Any requests to remove copyright material will be acted upon in a timely and appropriate manner. Any attempt to extort money from Space Media Network will be ignored and reported to Australian Law Enforcement Agencies as a potential case of financial fraud involving the use of a telephonic carriage device or postal service. |