| . |  |
. |
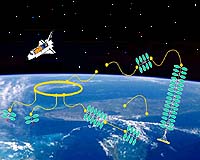
A unique University of Southern California design for self-organizing robots controlled by "hormonal" software is moving toward space. At the Robosphere 2002 conference held at the NASA Ames Research Center in Silicon Valley November 14-15, Wei-Min Shen of the USC School of Engineering's Information Sciences Institute (ISI) presented an overview of an audacious project to have pieces of the proposed half-mile-long Space Solar Power System satellite put themselves together -- self-assemble -- without the help of astronauts. Shen and co-principal investigator Peter Will are doing more than proposing. They are already testing the hardware and software the system would use in the ISI Polymorphic Robotics Laboratory, of which Shen is director. Over the past two and a half years, Shen and Will have developed modular individual robot units, each with a computer chip programmed with what the researchers call "hormonal" software. Shen said that such software allows "bifurcation, unification, and behavior shifting" by the modules. The units can unite themselves into larger wholes, or divide themselves up into smaller ones. "If a six-unit snake splits in half," explained Shen, "you get two smaller, three-unit snakes that function as the larger one did." Separated units communicate using infrared signals, maneuvering their coupling units into a lock in cooperative, coordinated fashion. "Behavior shifting" means that the individual units -- which are identical -- exhibit different behavior according to their position in the assembly. Will and Shen's CONRO project created working units that use the software. Shen and Will's new SOLAR space station proposal, funded by a consortium including NASA, the NSF, and the Electric Power Research Institute (EPRI), proposes to use this architecture on a gigantic scale. They propose a self-assembling space station consisting of two species of robotic devices, both controlled by the same software. One species will be the parts that will actually make up the station: solar power units, including necessary utility conduits. Each of these will have a microprocessor running hormonal software. Sets of contiguious units will, once released into space, arrange themselves into the desired configuration. When these subassemblies are ready, they will signal and alert the second species of robot, the "free-flying intelligent fiber rope matchmaker units," or whips. Whips will consist of two modular robot units connected by a long connector line that can shorten or lengthen at the direction of the software. They will also have solar- powered rockets, enabling them to move in space, GPS sensors to find their position, communicators, and connectors. When a completed subassembly signals, a whip will maneuver toward it, lock on, wait for a call from a second assembly, tow the first over, pull them together by winching in the fiber rope, so that the two can attach to each other. Once mating accomplished, the whip unit would then fly off to find other parts to assemble. The design, said Will, combines the advantages of free- flying and tethered systems. In the laboratory, Shen and Will have modeled the concept in two-dimensional form, working with an air-hockey table on which prototype individual units will learn to find each other by sensing each other's infrared signals, maneuver next to each other using built-in fans, lock on, and pull units together using a motorized cable. "This will give both the hardware and software a realistic test," said Shen. Researcher Harshit Suri has built a first prototype unit. Shen and Will won the grant from the NSF/NSA/EPRI consortium that funds their work in a rigorous competition in which 76 proposals were received and only four were funded. Shen, Will, and ISI collaborator Behnam Salemi published a detailed paper, "Hormone-Inspired Adaptive Communication and Distributed Control for CONRO Self-Reconfigurable Robots," in IEEE Transactions on Robotics and Automation in October, 2002. They have recently applied for a U.S. patent on the technology. Working with Shen and Will in the field of space assembly are two faculty members from the USC School of Engineering: Berokh Khoshnevis of the department of industrial and systems engineering; and George Bekey, of the department of computer science. Along with Suri and Salemi, Yusuf Akteskan is working on the space system project. The ISI Polymorphic Robotics Laboratory is one of six laboratories associated with the USC School of Engineering's Center for Robotics and Embedded Systems. Related Links SOLAR Self-Assembly ISI Polymorphic Robotics Laboratory Robosphere 2002 Conference USC Center for Robotics and Embedded Systems SpaceDaily Search SpaceDaily Subscribe To SpaceDaily Express  Philadelphia - Nov 19, 2002
Philadelphia - Nov 19, 2002When they make their first public display of tele-immersion at this week's Super Computing 2002 conference in Baltimore, computer scientists will also attain another first: a "network computer" that processes data at a location far removed from either input or output. ESA's Good-Natured DevILS  Paris (ESA) Oct 25, 2002
Paris (ESA) Oct 25, 2002The European Space Agency (ESA) has started a 50-million-euro initiative to bring together Europe's leading aerospace companies for the next four years. The aim of DevILS is to develop 'intelligent', lightweight spacecraft systems that ESA can use on future missions. Having these 'plug-and-play' systems will allow Europe to create lighter spacecraft that perform better.
|
| ||||||||||
| The content herein, unless otherwise known to be public domain, are Copyright 1995-2016 - Space Media Network. All websites are published in Australia and are solely subject to Australian law and governed by Fair Use principals for news reporting and research purposes. AFP, UPI and IANS news wire stories are copyright Agence France-Presse, United Press International and Indo-Asia News Service. ESA news reports are copyright European Space Agency. All NASA sourced material is public domain. Additional copyrights may apply in whole or part to other bona fide parties. Advertising does not imply endorsement, agreement or approval of any opinions, statements or information provided by Space Media Network on any Web page published or hosted by Space Media Network. Privacy Statement All images and articles appearing on Space Media Network have been edited or digitally altered in some way. Any requests to remove copyright material will be acted upon in a timely and appropriate manner. Any attempt to extort money from Space Media Network will be ignored and reported to Australian Law Enforcement Agencies as a potential case of financial fraud involving the use of a telephonic carriage device or postal service. |