| . |  |
. |
 Nomad Has Confidence
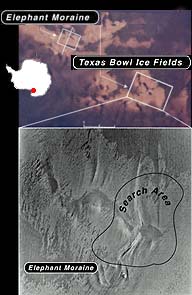
Nomad Has ConfidencePittsburgh - February 4, 2000 - With the help of machine learning and statistical techniques, Nomad puts a numerical value on its confidence that a rock is or is not of extraterrestrial origin. It classified its first meteorite with a confidence rating 2.5 times higher than any other rock it examined. The more rocks it studied, the higher its confidence rating went in making its determinations. Six researchers from Carnegie Mellon's Robotics Institute and ANSMET team member John Schutt accompanied Nomad to Elephant Moraine. After Nomad located the meteorites, Schutt collected and gave them a temporary numerical label. "This is a small step for a robot and a big step for robot kind," said William L. "Red" Whittaker, principal investigator for the Robotic Search for Antarctic Meteorites initiative. "This marks the first discovery in the natural world by robotic machine intelligence and sets a precedent for a new class of robotic science on Earth and in space," said Whittaker. "Nomad's meteorite finds are a great achievement," said Apostolopoulos. "However, it had to gather still more data. During the last three days of the expedition, the robot was turned loose in an unscouted area to seek meteorites among high concentrations of terrestrial rocks mixed with snow and ice. "Making more interpretations like this in the field enabled Nomad to prove its robustness. Further analysis of the field data will allow a solid scientific evaluation of the robot's abilities and can help set expectations for future generations of planetary rovers." "With these finds, Nomad takes robotics beyond the typical concerns about nuts and bolts and into the universe of scientific inquiry," said Ralph Harvey, principal investigator for ANSMET. "We all dream of a future where robots can act and perhaps even think independently," he added. "Nomad has now taken the first steps along that path," added Harvey. Nomad's expedition to Elephant Moraine is a collaborative effort between the Robotics Institute at Carnegie Mellon University and the National Science Foundation's (NSF) Antarctic Search for Meteorites program. It is being performed under the auspices of NSF's Office of Polar Programs. The Nomad robot has been developed through research at Carnegie Mellon's Robotics Institute and is funded by grants from NASA's Surface Systems Thrust of the Cross Enterprise Technology Development and Space Telerobotics programs.
ROBOTS DO ANTARCTICA - PART ONE
Previous Nomand Reports
Offsite Links
ROBOSPACE
|
| |||||||||
| The content herein, unless otherwise known to be public domain, are Copyright 1995-2016 - Space Media Network. All websites are published in Australia and are solely subject to Australian law and governed by Fair Use principals for news reporting and research purposes. AFP, UPI and IANS news wire stories are copyright Agence France-Presse, United Press International and Indo-Asia News Service. ESA news reports are copyright European Space Agency. All NASA sourced material is public domain. Additional copyrights may apply in whole or part to other bona fide parties. Advertising does not imply endorsement, agreement or approval of any opinions, statements or information provided by Space Media Network on any Web page published or hosted by Space Media Network. Privacy Statement All images and articles appearing on Space Media Network have been edited or digitally altered in some way. Any requests to remove copyright material will be acted upon in a timely and appropriate manner. Any attempt to extort money from Space Media Network will be ignored and reported to Australian Law Enforcement Agencies as a potential case of financial fraud involving the use of a telephonic carriage device or postal service. |
 West Lafayette - January 17 2000 - The population of robots nearly doubled over the last decade in North America alone, and they are becoming increasingly important in applications ranging from quality control to space exploration, surgery to the service industry. So says the most recent edition of the "Handbook of Industrial Robotics," complete with a forward by late science fiction writer Isaac Asimov and contributions from 120 experts, some of them giants in research and industry. The term "industrial robots" refers to all robots manufactured by industry, not simply robots used in industry.
West Lafayette - January 17 2000 - The population of robots nearly doubled over the last decade in North America alone, and they are becoming increasingly important in applications ranging from quality control to space exploration, surgery to the service industry. So says the most recent edition of the "Handbook of Industrial Robotics," complete with a forward by late science fiction writer Isaac Asimov and contributions from 120 experts, some of them giants in research and industry. The term "industrial robots" refers to all robots manufactured by industry, not simply robots used in industry.