| . |  |
. |
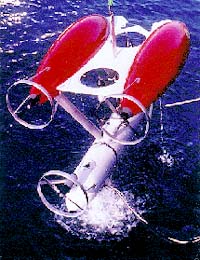
With spinning wheels, moving masses, and $675,000 awarded recently in research grants, Craig Woolsey of Virginia Tech aims to help improve the maneuverability, robustness and reliability of underwater, air, and space vehicles. Woolsey, who joined Virginia Tech's aerospace and ocean engineering faculty in 2001, has received a $375,000 National Science Foundation (NSF) Faculty Early Career Development Program (CAREER) Award and a $300,000 Office of Naval Research (ONR) Young Investigator Award to study the design of advanced controls and control mechanisms for unmanned vehicles. These awards are presented annually to a select roster of young faculty nationwide who have the potential to make significant contributions to research and education. A number of unmanned vehicles, such as the U.S. Air Force's Predator aerial vehicle and underwater exploratory vessels, perform well in limited maneuvers with humans controlling them from the ground or from ships, Woolsey explained. But suppose the Predator, in addition to taking off, flying within a limited range, and snapping photographs as ordered, could sense an anti-aircraft missile coming its way and take evasive action? Or suppose an unmanned submarine could be sent out to sea on its own � without being tethered to a ship � to track the boundaries of El Ni�o? Such vehicles would have to use sophisticated control devices and advanced control algorithms � the muscles and brains of any unmanned vehicle � in order to perform complex maneuvers, Woolsey said. His research for both the NSF and ONR projects will extend new methods of advanced control design to underwater vehicles by incorporating the important effects of lift, drag, and other fluid forces. "Lift � the force that keeps an airplane in the air, for example � is an important consideration for air and ocean vehicles, and even some space vehicles," he said. Woolsey and his graduate students are building a spherical underwater vehicle with internal rotors. These rotors are like the mechanisms used in many spacecraft to control where the spacecraft points, he explained. The vehicle will be tested in a water tank being constructed in Virginia Tech's Randolph Hall. "As a first step, we'll program the vehicle and have it perform maneuvers similar to those of an unmanned spacecraft," Woolsey said. "The next step will be to add a streamlined hull and a propeller and control how the vehicle swims." Woolsey also is exploring the use of moving masses for underwater vehicle control. One of the goals of his project is to find ways to perform successful maneuvers with most of the controls inside the vehicle. "In the ocean, external controls such as propellers and rudders are subject to corrosion and biological fouling and unusual problems like seaweed," he said. For unmanned ocean vehicles to operate on their own for long periods, their controls mechanisms would have to be protected � just as the controls for spacecraft have to be protected from intense forces and heat when re-entering the atmosphere. The devices and control strategies Woolsey is developing can be used for both of these applications. Another goal is to design controls that will enable the underwater vehicle to move at a low velocity or even hover without being thrown off-track by disturbances from waves or currents. "For instance," Woolsey said, "imagine an unmanned submersible that could find an underwater minefield on its own, then hover at the mines and plant detonators to clear the area for ship passage." Woolsey's CAREER project also has an educational focus. In addition to using his research on nonlinear controls in undergraduate and graduate courses, he is serving as the faculty adviser for a team of students who plan to enter an unmanned underwater vehicle competition. "One of my former students already has organized a team," he says. "Working with vehicles is one reason students go into engineering and hands-on projects are among the best learning tools." Woolsey became interested in his field of research as a Georgia Tech undergraduate. For several semesters, he worked as a cooperative education student with the U.S. Central Intelligence Agency, helping to analyze foreign missile systems. He continued his education at Princeton University, where he was a Guggenheim Fellow and earned his master's and Ph.D. degrees in mechanical and aerospace engineering. Related Links Dynamical Control Systems Laboratory Virginia Tech SpaceDaily Search SpaceDaily Subscribe To SpaceDaily Express  San Diego - Feb 5, 2002
San Diego - Feb 5, 2002Northrop Grumman Corporation has been awarded a $101 million contract by the U.S. Air Force to begin low-rate initial production of the Global Hawk high-altitude, long-endurance reconnaissance system.
|
| ||||||||||
| The content herein, unless otherwise known to be public domain, are Copyright 1995-2016 - Space Media Network. All websites are published in Australia and are solely subject to Australian law and governed by Fair Use principals for news reporting and research purposes. AFP, UPI and IANS news wire stories are copyright Agence France-Presse, United Press International and Indo-Asia News Service. ESA news reports are copyright European Space Agency. All NASA sourced material is public domain. Additional copyrights may apply in whole or part to other bona fide parties. Advertising does not imply endorsement, agreement or approval of any opinions, statements or information provided by Space Media Network on any Web page published or hosted by Space Media Network. Privacy Statement All images and articles appearing on Space Media Network have been edited or digitally altered in some way. Any requests to remove copyright material will be acted upon in a timely and appropriate manner. Any attempt to extort money from Space Media Network will be ignored and reported to Australian Law Enforcement Agencies as a potential case of financial fraud involving the use of a telephonic carriage device or postal service. |